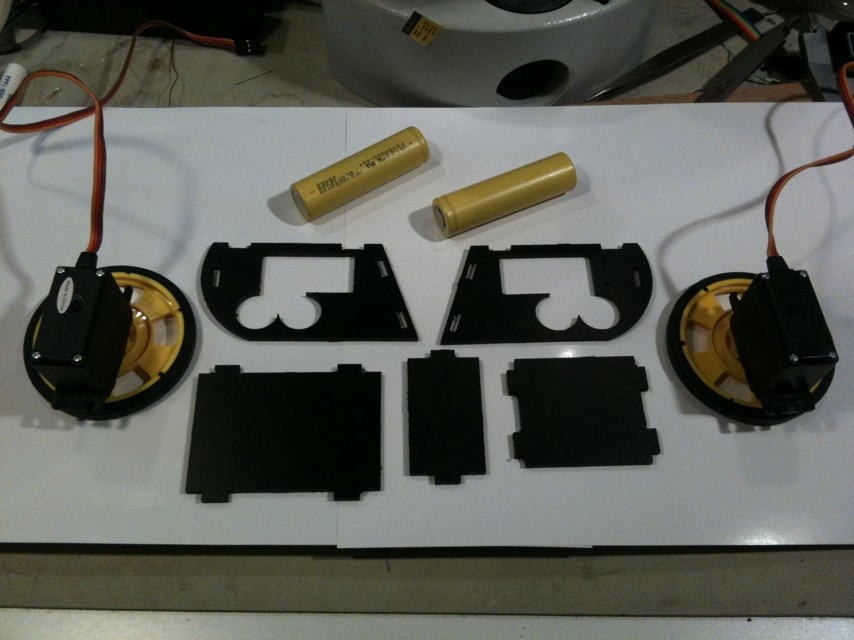
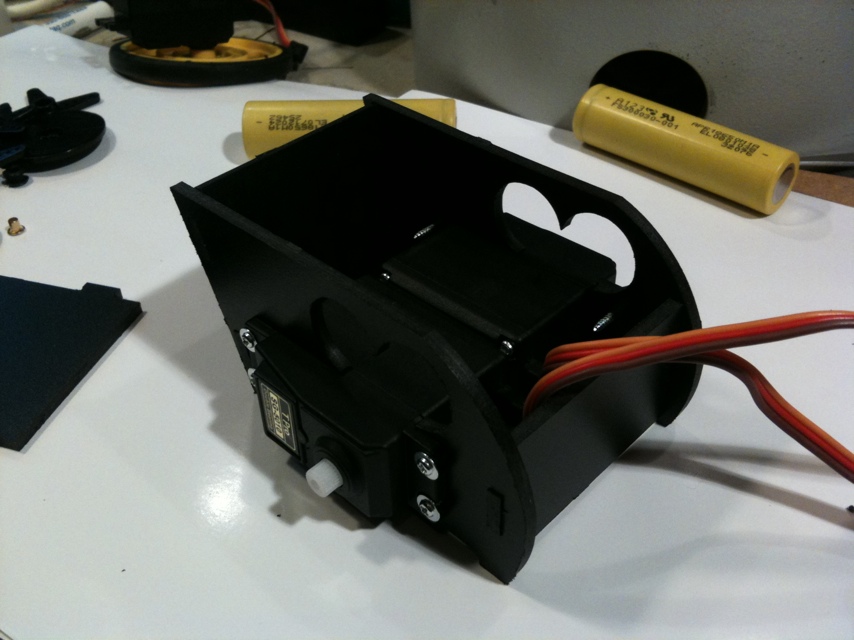
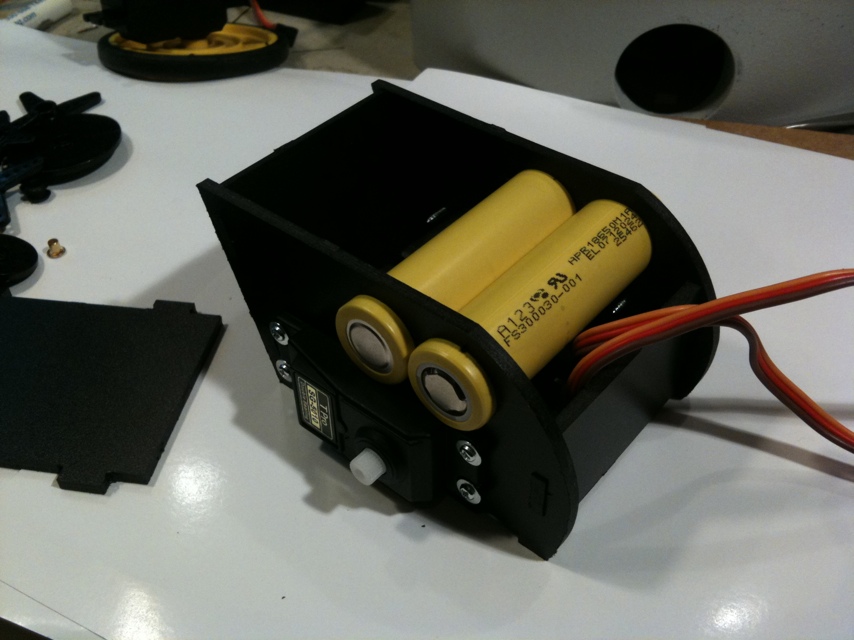
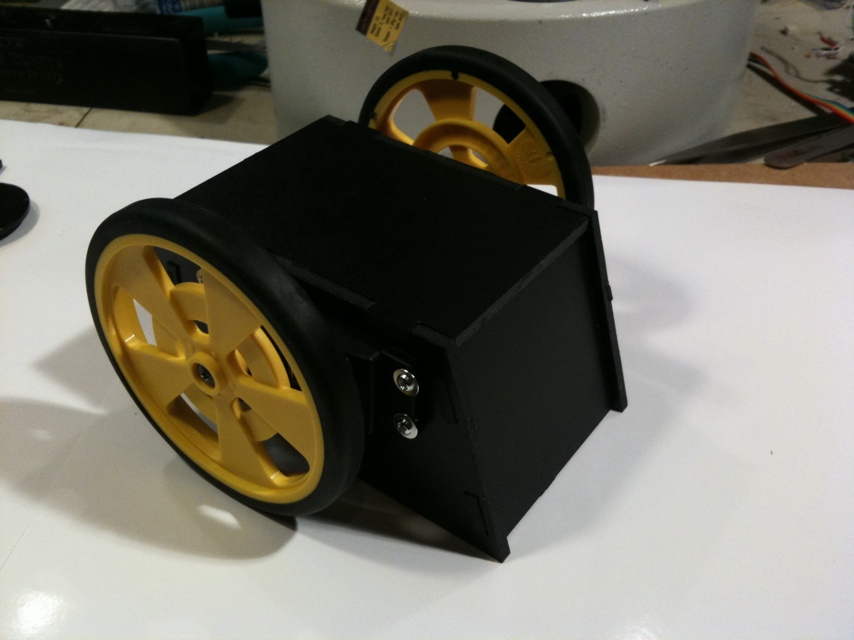
I drew up a quick design in QCad and cut it out of sintra this afternoon to see how it would work to create a little snap together minisumo frame. The idea is that the batteries and motors are held captive inside everything, all that is needed is to add motors, sensors and a front blade.
Black is a hard colour to get a good photo of with my iphone. Yuck! Anyhow, you can see the basic idea that I was going for. I’ve got some tweaks to make that are obvious (mounting screws for the servos aren’t quite in the right location, curve on the back of the robot is about 1mm bigger than the wheels so it needs to be shrunk), and a couple that aren’t quite as obvious to me yet.
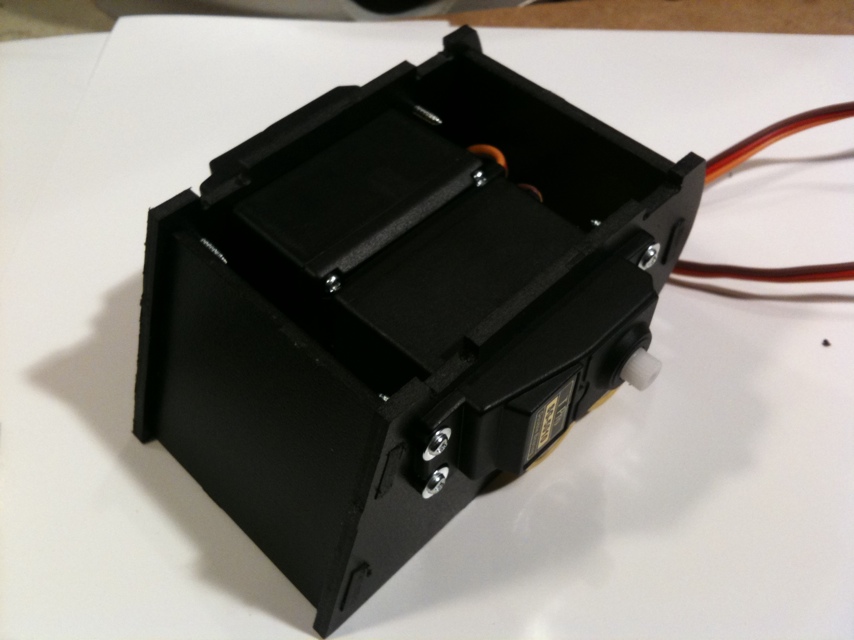
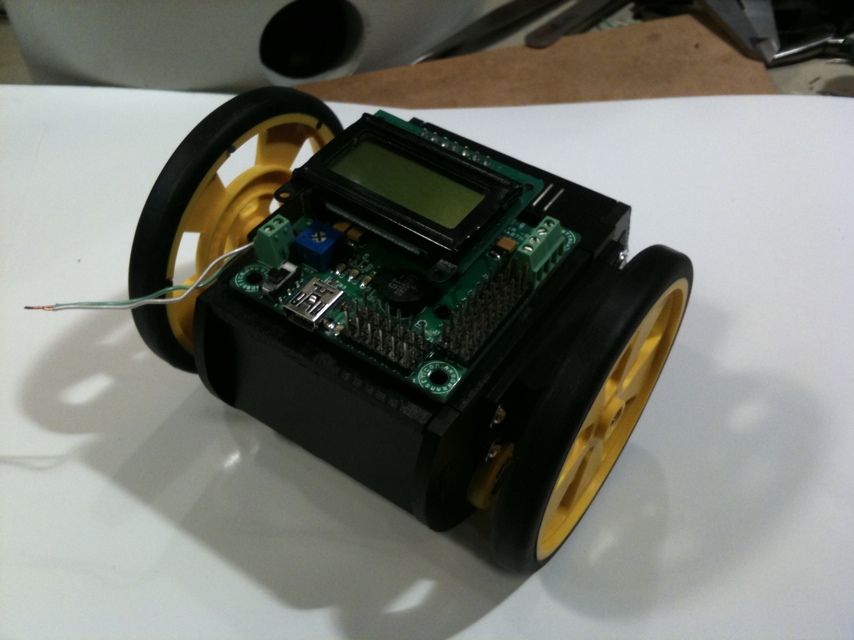
I’m not real happy with the front of it right now… I might move that sintra plate back to make room for a PCB to run right there for floor sensors and front IR distances sensors… or I might move the plate up flush with the front and put the electronics behind it? Depends on what the front blade would look like I suppose.
The frame is actually quite rigid right now even though it is just press fit together. I was very surprised that my crazy 2D drawings actually ended up fitting.