
The time has finally come to make a robot arm. Its been on list of things to do since forever. Possibly even longer.
The gripper had me scratching my head a bit. Until I realized that it was pretty dang easy to run one side of the gripper with a servo and have the other side synchronized with a gear.

Whipped a quick drawing in QCad, imported it into CamBam, dumped out the gcode and off to the Taig CNC to cut it out of 3mm sintra.
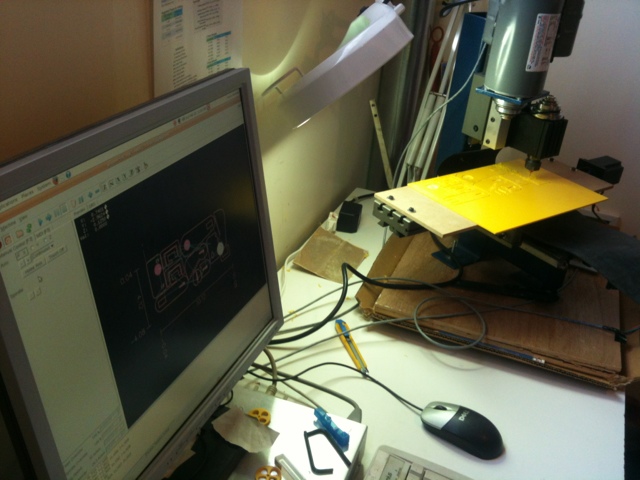
Realized today that I’m still running EMC 2.3.4 from 2008! Wow… Ubuntu 8.04 or something along those lines. Can’t decide if I should bother to upgrade. The machine has been working well so I don’t want to jinx it. Maybe this summer.
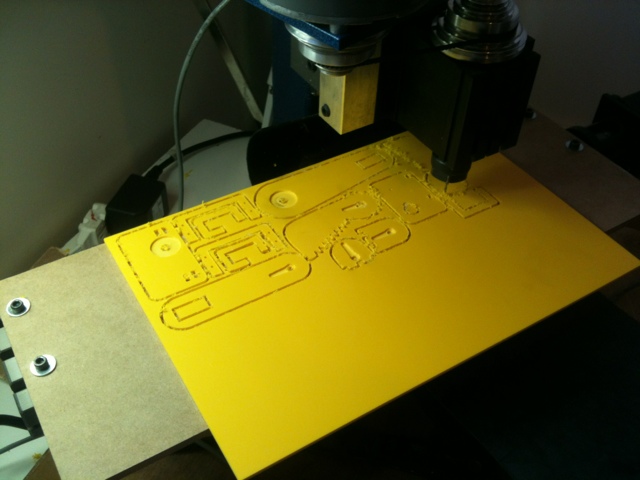
Not too bad… takes half an 8×12 piece of sintra to cut out the arm. I’m too lazy to cut my own sintra so I buy these sheets from Solarbotics. Likely about twice the price of simply buying a 4×8 sheet of sintra and cutting it down, but getting it in smaller chunks like this means that I can have lots of different colours instead of a crate load of a single colour.
And then off to assemble the arm. I had a bunch of Hobbyking HK15178 and Moxie M38N servos kicking around so I used the 2 larger M38N servos on the base and shoulder joint and 4 of the smaller HK15178 servos everywhere else (elbow, 2x wrist and gripper).
The yellow version shown here is actually the second attempt. The first attempt was close, but I had forgotten to drill holes for the servo horn screws and the mounting holes for the HK15178 servos were too larger. You’ll see in the pictures below that the arm has a red base from the first go… it didn’t change between revs so I left it in rather than switch to yellow.




I haven’t powered it up yet. That’s coming this week. The elbow servo may end up having to change to a larger 38g servo instead of the small 9g servo.
2 Responses to Get a grip